





Le case automobilistiche sono state catturate dalla scarsità di componenti elettronici, anche se la tendenza delle auto intelligenti è irresistibile. Come la prova più immediata e impressionante di intelligenza per gli utenti, il sistema PEPS (Passive Entry and Passive Start) non è più una caratteristica di alto profilo solo per le auto di fascia alta. È stato introdotto nei modelli di fascia media o addirittura economici da molte case automobilistiche, in particolare dai marchi emergenti. Nel mercato cinese, dove le vendite di veicoli elettrici hanno registrato una crescita di oltre il 100% nella prima metà del 2022, i principali produttori di auto elettriche come BYD, GAC Aion, Geely, Nio, Xpeng e Li Auto hanno sostanzialmente dotato tutti i modelli di PEPS .

Mentre quella centralina stordisce silenziosamente noi automobilisti, abbiamo mai pensato di sondare le tracce della sua realizzazione e la prospettiva del suo futuro? Mettiamoci in viaggio.
PEPS offre agli automobilisti l'esperienza di entrare in sicurezza nell'auto senza sbloccare manualmente l'attività. Il motore e il sistema HVAC dell'auto possono essere avviati a distanza prima che il conducente o i passeggeri entrino nell'auto. Mentre tutti i passeggeri lasciano l'auto, il PEPS bloccherà automaticamente l'auto. In questo modo, gli utenti dell'auto godono della comodità dell'ingresso passivo con sicurezza rassicurata. Sarà per questo che lo chiamiamo con la parola “passivo”.
Ieri: RKE e PKE
Attualmente, le soluzioni PEPS tradizionali integrano tecnologie wireless come Bluetooth Low Energy (BLE), NFC, RFID (alta frequenza e bassa frequenza) ecc. Ebbene, come funzionano? Sarebbe difficile da digerire se raccontassimo la storia fino ad oggi. Allora, perché non torniamo a ieri?
Alla fine degli anni '90, alcuni modelli di auto di fascia alta hanno introdotto gradualmente un sistema di accesso remoto senza chiave (RKE) un'evoluzione rispetto alla precedente soluzione IMMO (immobilizzatore) basata su RFID a bassa frequenza (125 KHz). Come predecessore del PEPS, l'RKE ha il telecomando per trasmettere segnali UHF (frequenza ultra alta) a un ricevitore RF collegato al BCM (modulo di controllo della carrozzeria) dell'auto per verificare l'identità dell'utente. Una volta verificato l'ID, il sistema eseguirà un'azione di apertura/chiusura porta guidata dal BCM. Tale meccanismo di verifica unidirezionale, come mostrato nella Figura 1, può essere interpretato come un cifrario anticipato in un film di spionaggio. Quando un agente segreto in visita arriva in un luogo di riunione, lui o lei deve parlare o mostrare una cifra del genere. Se la cifra è corretta, lui o lei potrà entrare. Lo svantaggio di questo meccanismo è che una volta che il nemico si è infiltrato e ha ottenuto la cifra,
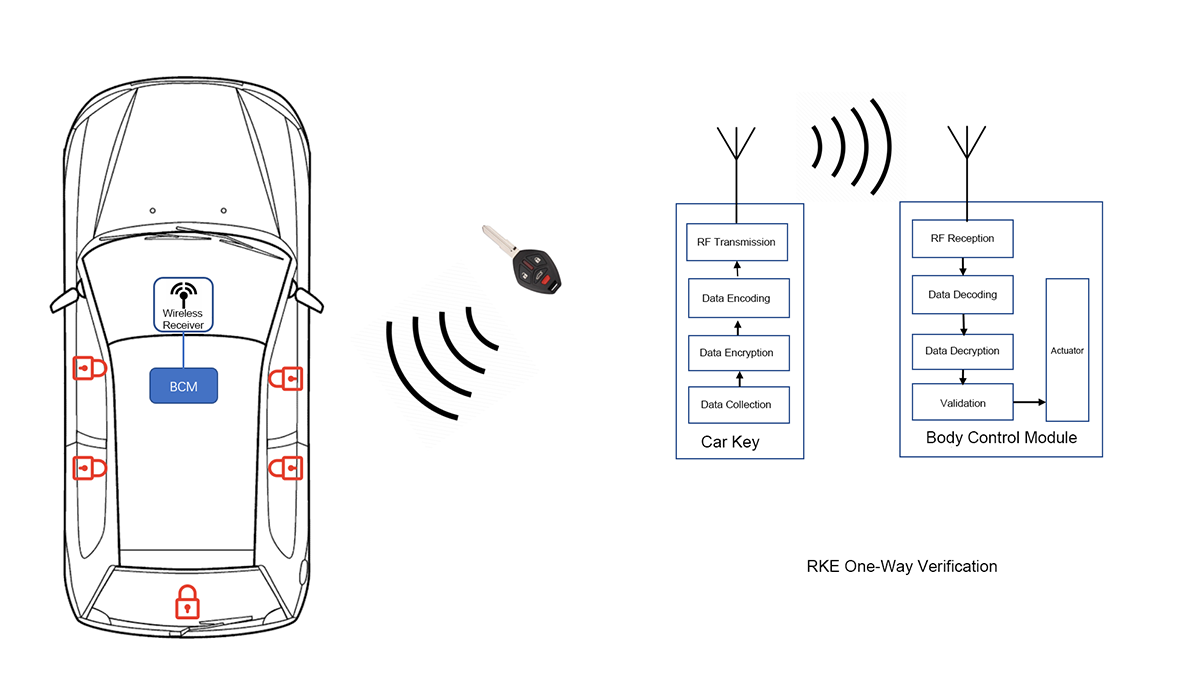
Figura 1. Meccanismo di lavoro di RKE
La soluzione RKE adotta bande di frequenza di 315 MHz (in USA, Cina e Giappone ecc.), 433,92 MHz (in Europa, Cina) e 868 MHz (in Europa). In termini di modulazione del segnale, la maggior parte dei paesi adotta l'ASK (amplitude shift keying ), mentre il Giappone adotta la modalità FSK (frequency shift keying). I fornitori di IC come Silicon Labs, Maxim, Microchip e NXP ecc. hanno offerte in questo campo.
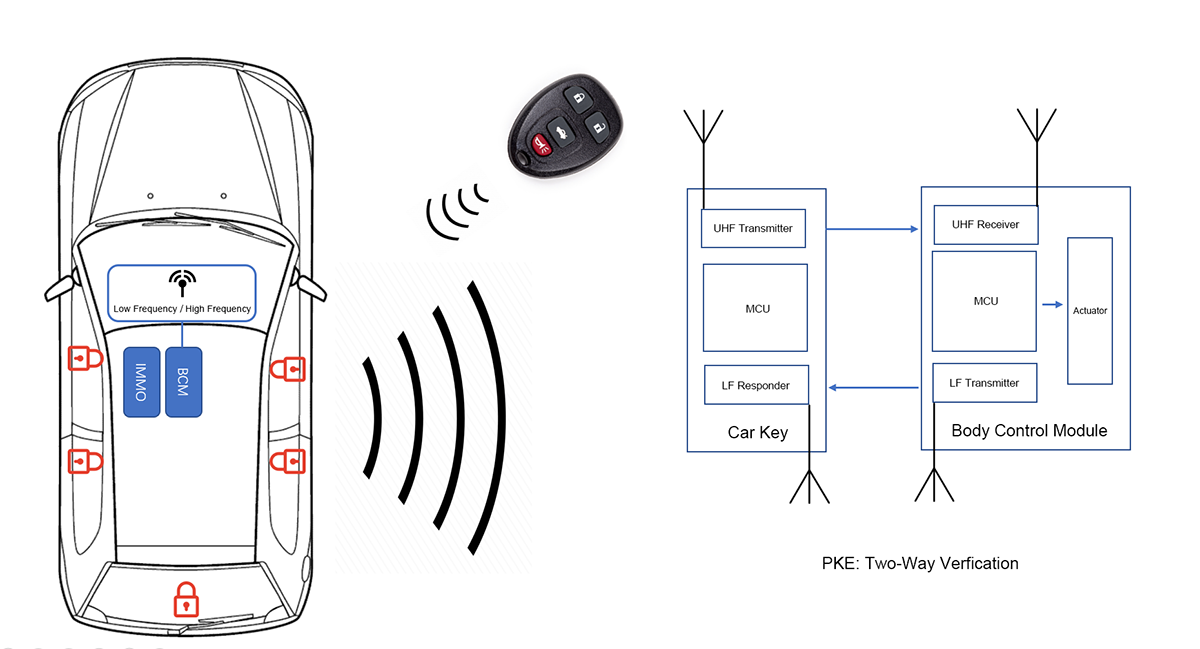
Figura 2. Meccanismo di lavoro di PKE
Oggi: Bluetooth PEPS è mainstream
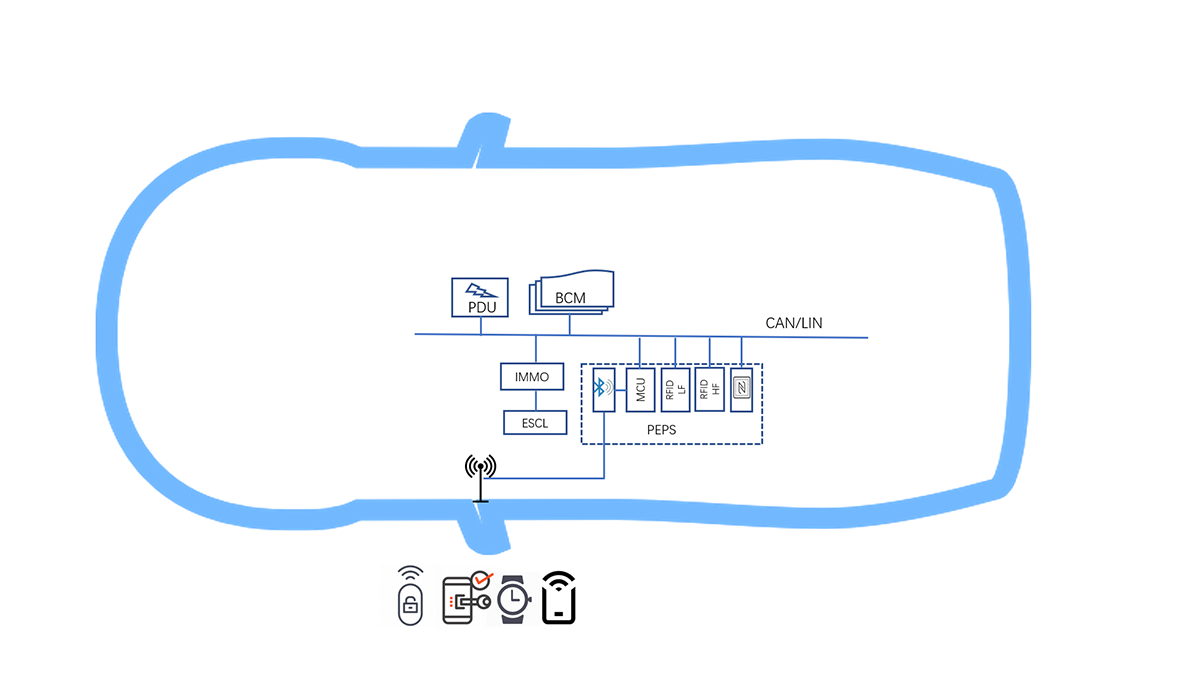
Figura 3. Schema PEPS Bluetooth entry level (stazione singola RSSI)
Tecnologia AOA per realizzare PEPS mainstream
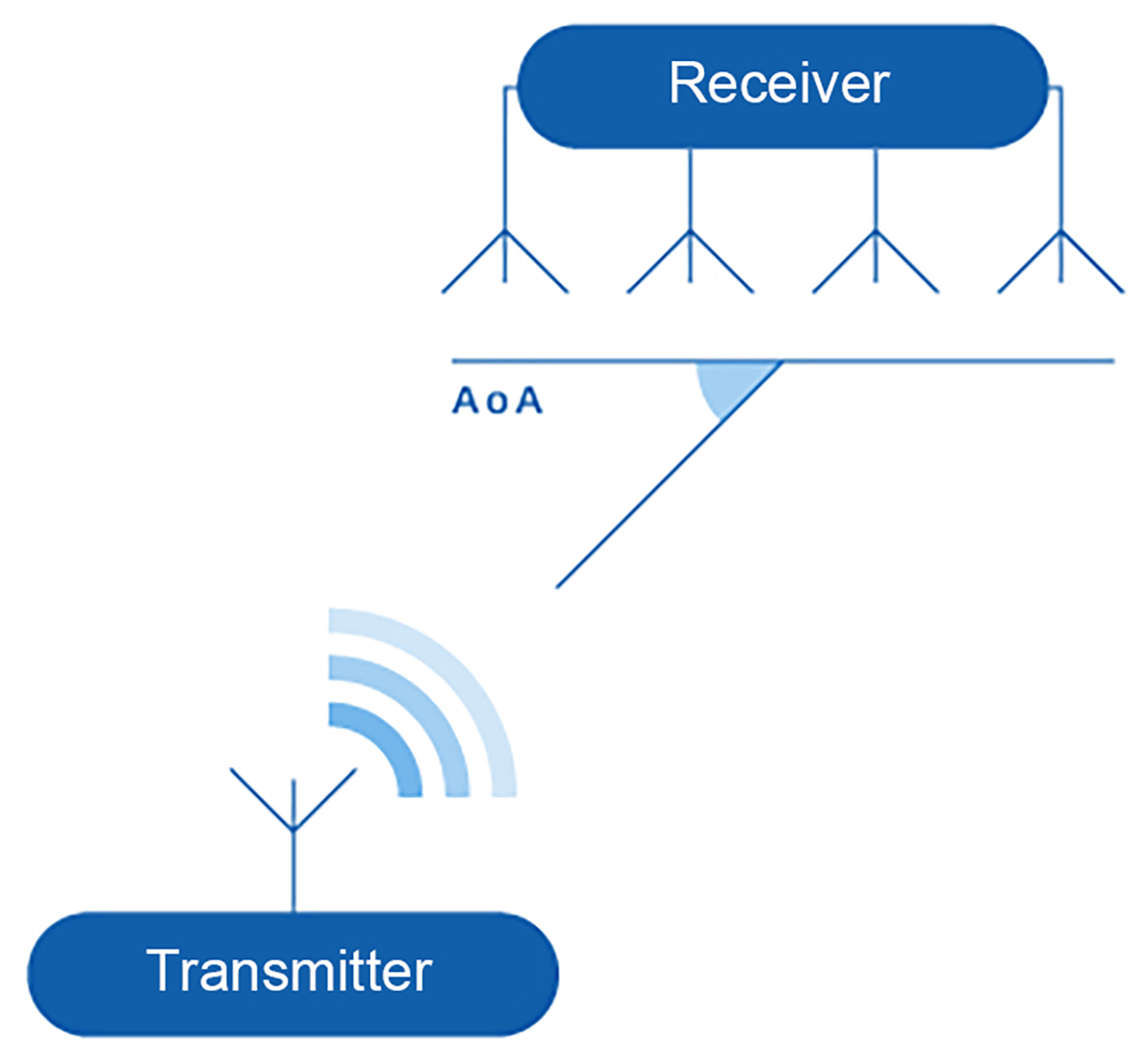
Figura 4. Posizionamento Bluetooth AOA
Ovviamente, per migliorare il livello di precisione del posizionamento è necessario il supporto di più stazioni base Bluetooth dotate di algoritmo AoA. Pertanto, nei modelli di fascia media, le case automobilistiche scelgono di implementare Bluetooth PEPS multipunto come illustrato nella Figura 5, tuttavia il numero esatto di stazioni base e il modello di layout variano in una certa misura per i diversi modelli di auto.
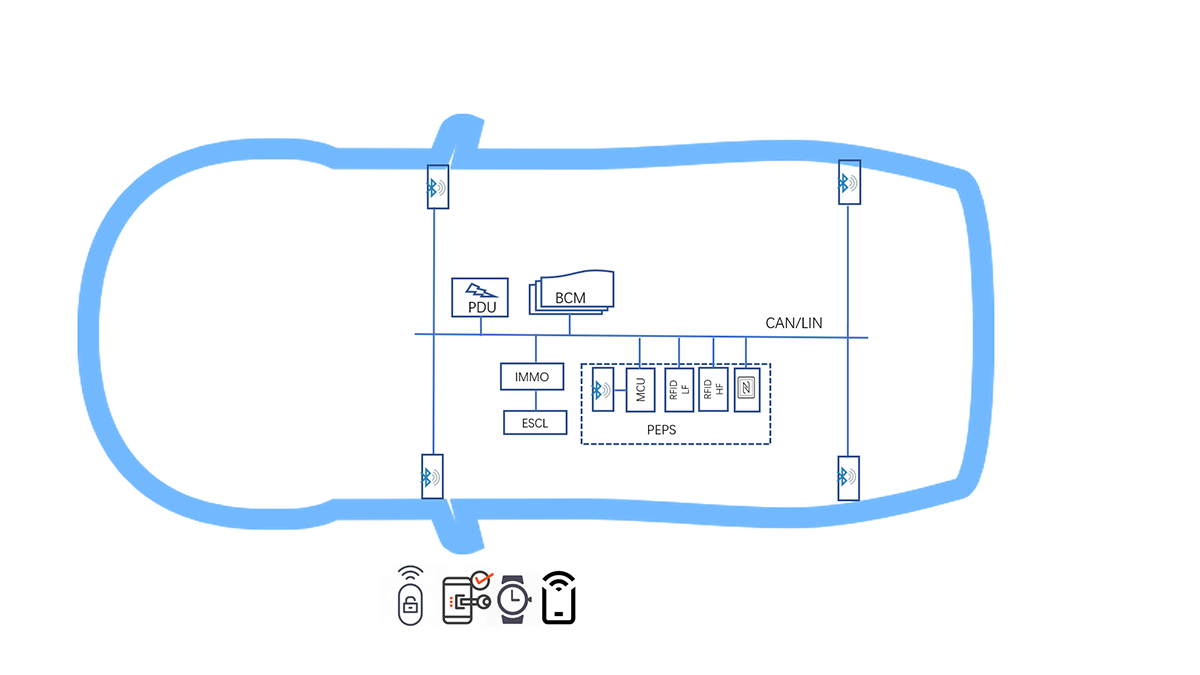
Figura 5.Soluzione PEPS Bluetooth mainstream (posizionamento AoA)
I SoC più adottati nell'arena Bluetooth PEPS includono TI CC2640, Silicon Labs EFR32BG22 e NXP KW36 ecc.
Domani: UWB is Promising
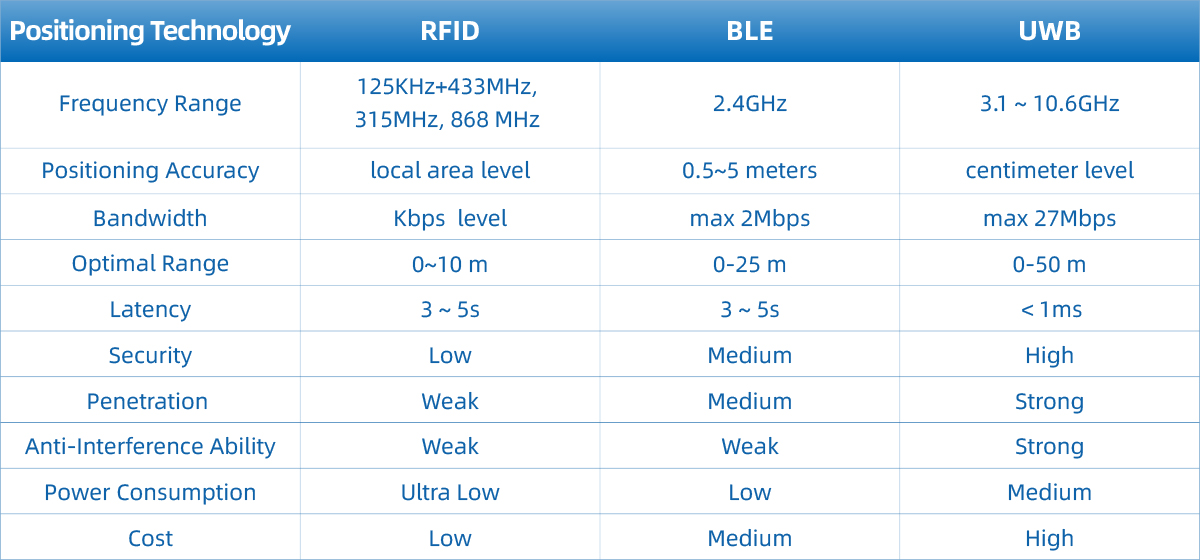
Tabella 1. Confronto delle tecnologie di posizionamento PEPS
Algoritmi di posizionamento per UWB
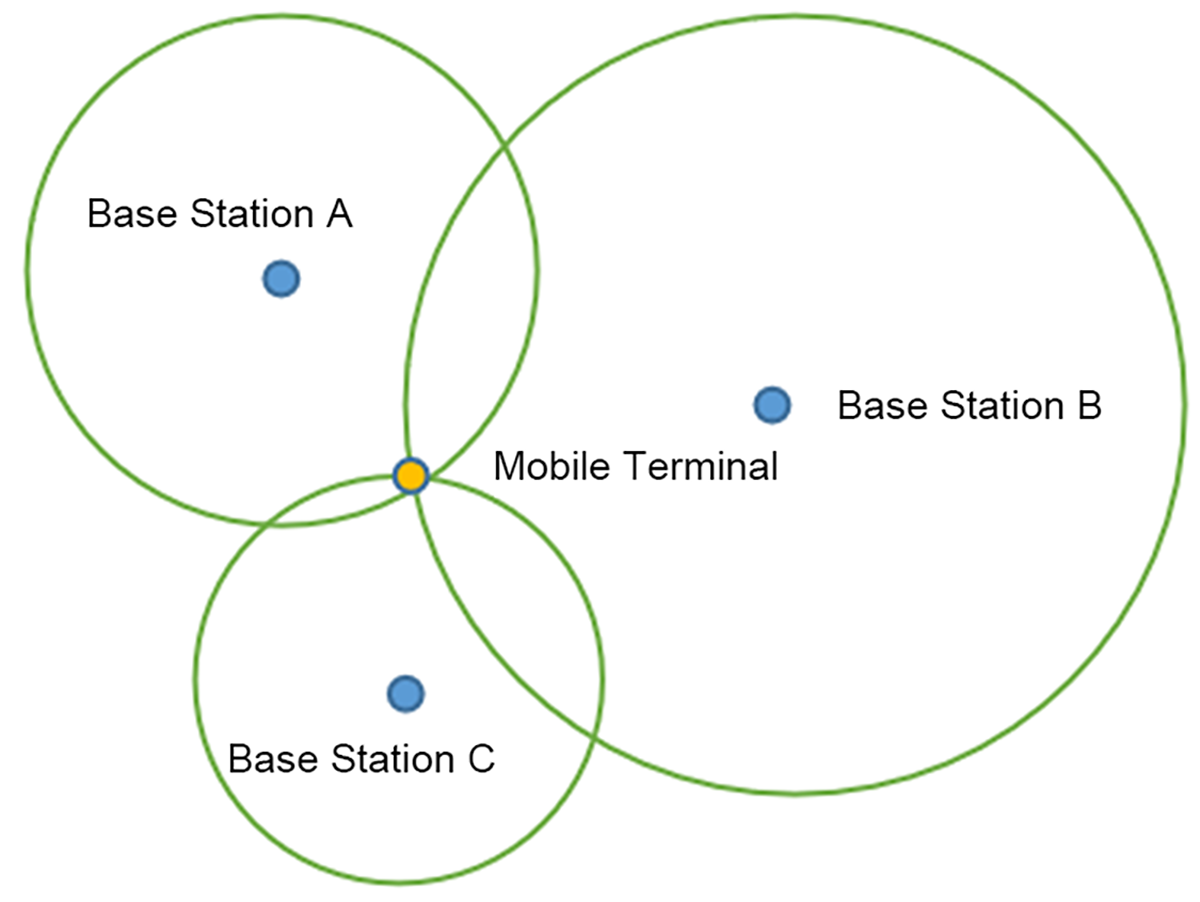
Figura 6. Algoritmo di posizionamento TOA (metodo di posizionamento circolare)
Un miglioramento rispetto a TOA, TDOA conduce una sincronizzazione precisa tra le stazioni base, che è facile da realizzare. Nessuna sincronizzazione temporale tra il terminale mobile e le stazioni base, come mostrato in Figura 7. Calcolare innanzitutto la differenza di distanza tra il terminale mobile e la stazione base A e quella tra questo e la stazione base B. Il terminale mobile deve trovarsi su un'iperbole con la stazione base A e la stazione base B come focus. Un altro insieme di iperboli può essere ottenuto dalle differenze di distanza tra il terminale mobile e la stazione base A e la stazione base C, e l'intersezione delle iperboli è la posizione del terminale mobile. Nell'area del veicolo, l'influenza del multipath, del rumore, ecc. può essere ridotta anche mediante la differenza di distanza.
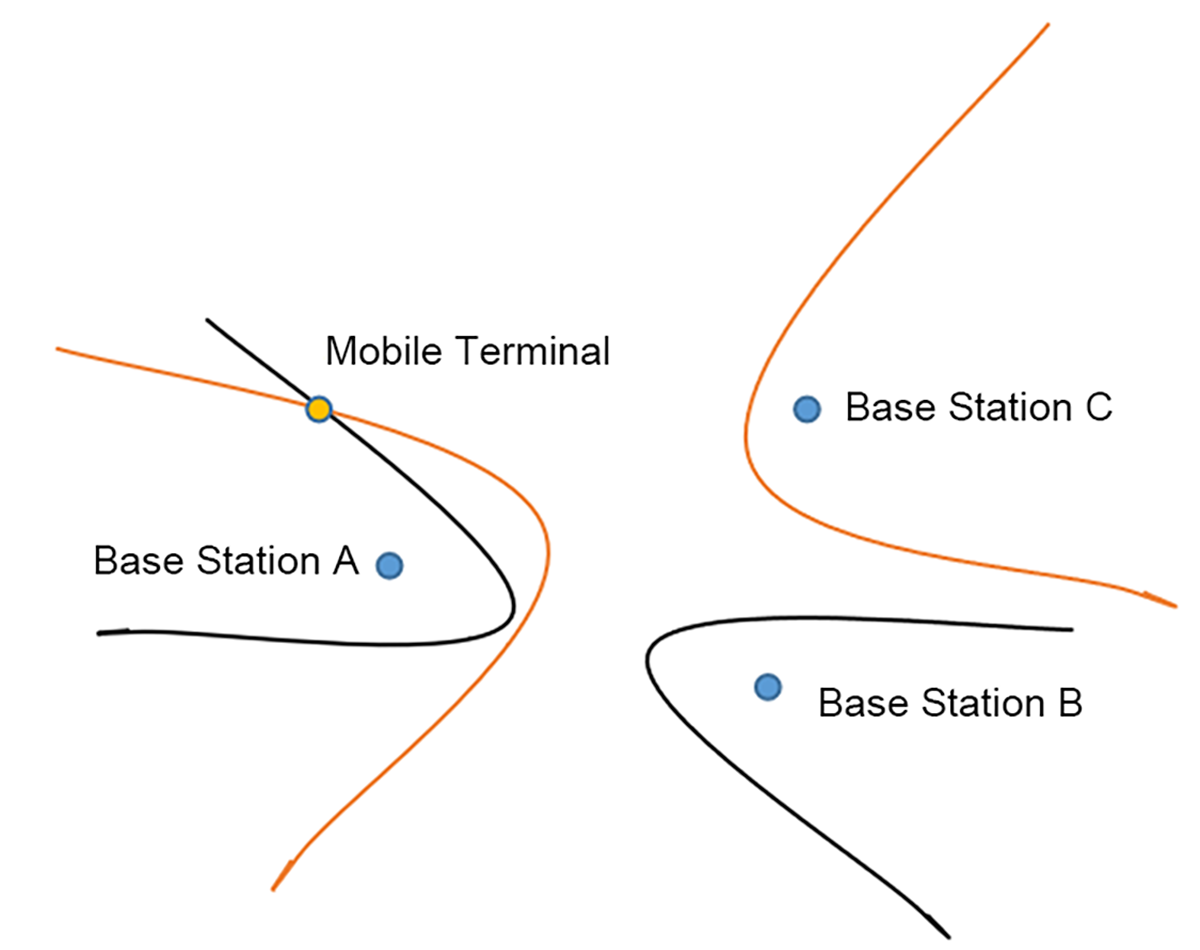
Figura 7 Algoritmo di posizionamento TDOA
Il posizionamento AOA calcola l'angolo di arrivo in base al principio della differenza di fase e necessita solo di due stazioni base per ottenere il posizionamento. A causa del problema della risoluzione angolare, la precisione di posizionamento diminuisce all'aumentare della distanza dalla stazione base e viene utilizzata principalmente per il posizionamento a brevi e medie distanze.
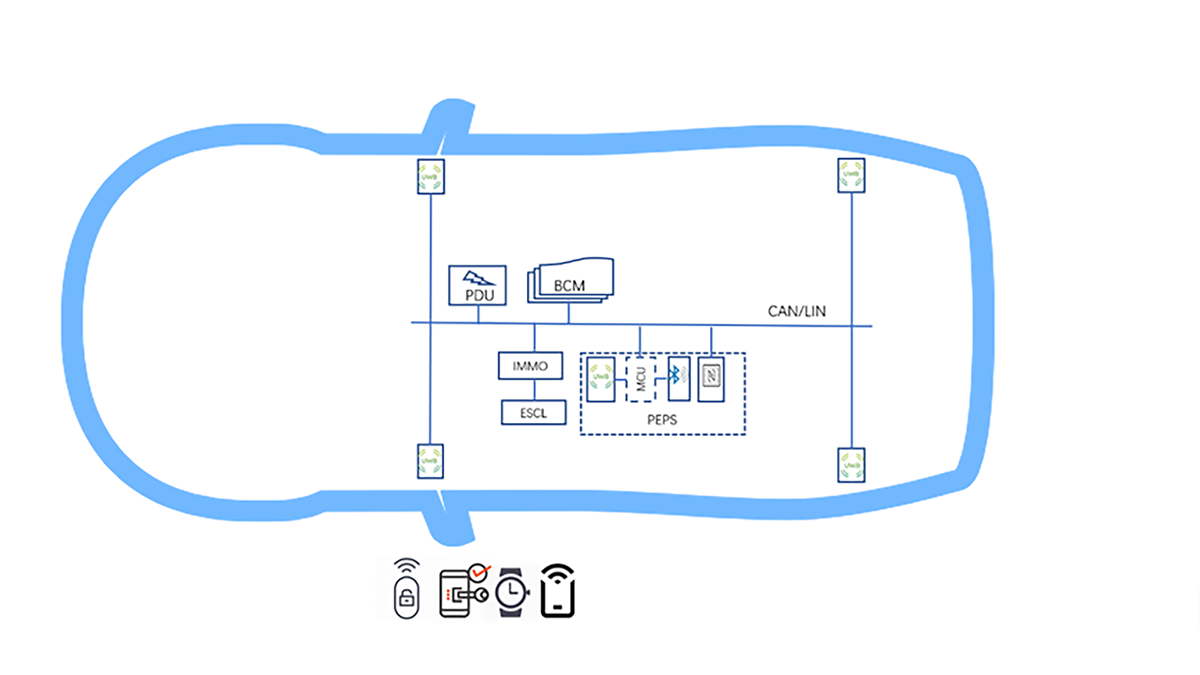
Figura 8. Architettura di implementazione di UWB PEPS specificata da CCC 3.0
Nel campo dei chip UWB, i produttori maturi attualmente riconosciuti sono Apple, NXP Trimension e QORVO Decawave. Tra i circuiti integrati rilasciati, solo NXP Trimension NCJ29D5 soddisfa i requisiti delle normative sui veicoli.
Estensione: Bio-Radar
L'esperienza di UWB PEPS per i conducenti è intima e sicura. Tuttavia, i passeggeri in macchina si sentono allo stesso modo? Di solito sì, ma no in alcuni casi speciali. A volte è duro per loro. Ad esempio, se il conducente esce dall'auto, le porte si bloccano automaticamente. Un bambino o un tenero animaletto è stato accidentalmente lasciato in macchina. L'auto deve inviare l'allarme al conducente? Assolutamente necessario! Fortunatamente, può essere ben affrontato da UWB.
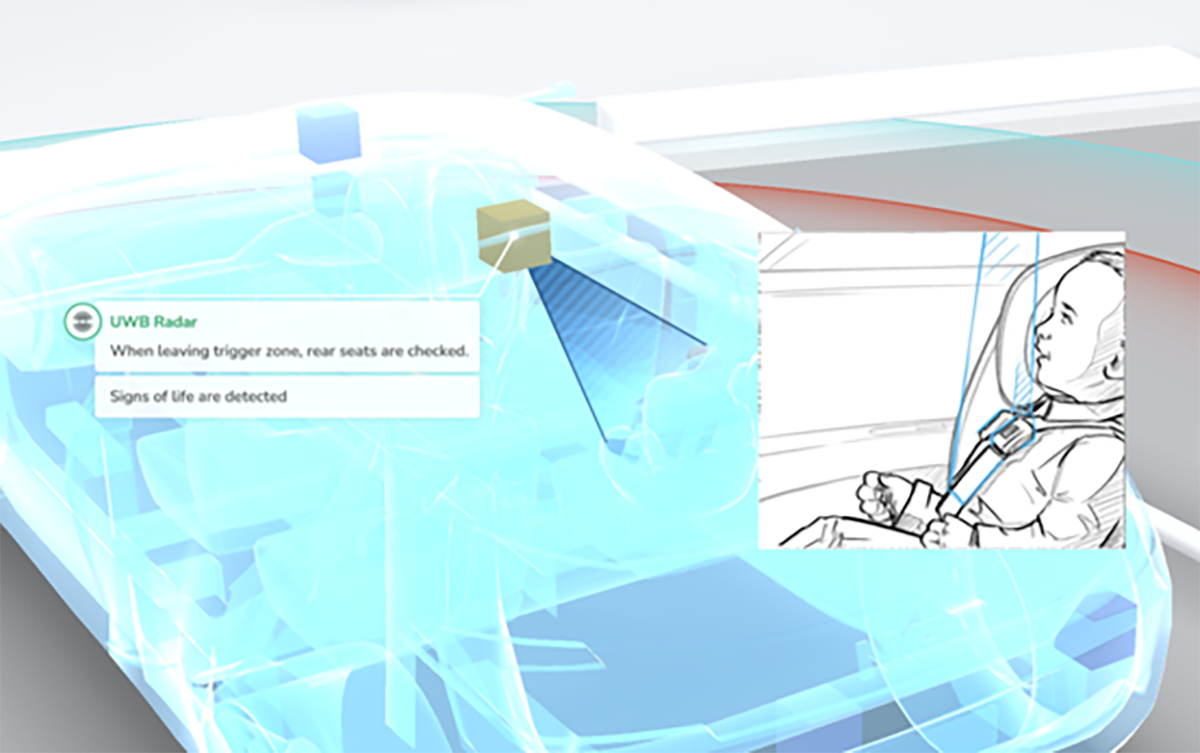
Figura 9. Rilevamento della vita con UWB Bio-Radar
Tronco: Kick-to-Open
Oltre al rilevamento della vita all'interno del veicolo, basato sulla funzione di percezione del movimento del radar UWB, l'UWB ha anche un'intelligente applicazione di stomping per aprire il bagagliaio. Quando l'identità del conducente raggiunge la parte posteriore del veicolo, il radar UWB è in grado di rilevare con precisione l'azione di calpestio, aprendo così automaticamente il bagagliaio del veicolo.
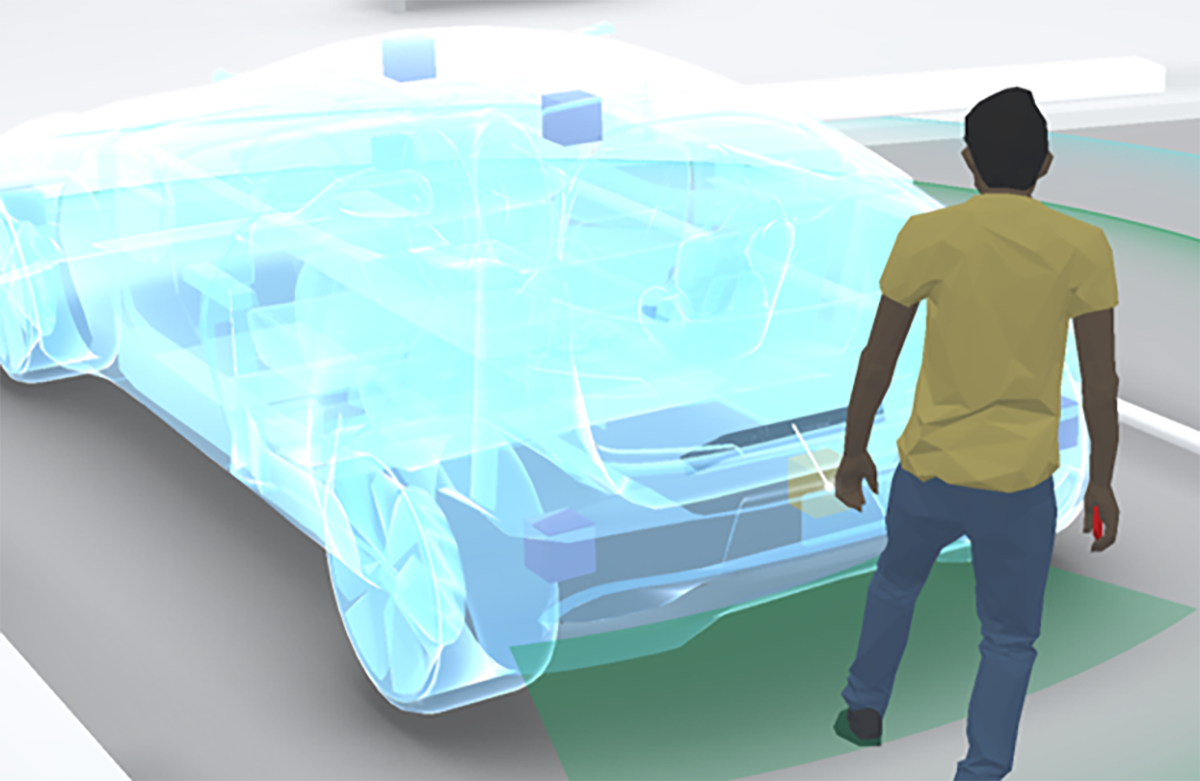
Figura 10. UWB abilita la soluzione kick-to-open
Le due funzioni radar UWB descritte sopra, inclusi il bio-radar UWB e il radar kicking UWB, non richiedono hardware aggiuntivo, ma sono implementate solo riutilizzando l'hardware UWB lato veicolo senza aggiungere costi hardware aggiuntivi. Possiamo anche considerarli come parti della futura funzionalità PEPS UWB.
Parcheggio con servizio di ritiro e riconsegna auto automatizzato abilitato UWB
AVP (Automated Valet Parking) è la funzione di parcheggio con parcheggiatore autonomo. È conosciuta come la tecnologia di guida autonoma di livello L4 che offre agli utenti "libertà dell'ultimo miglio". Attualmente è lo scenario applicativo di guida autonoma più promettente per la commercializzazione, come mostrato nella Figura 11. Un altro enorme vantaggio dell'implementazione di un'esperienza PEPS con UWB è che fornisce le condizioni necessarie e sufficienti per implementare l'AVP sul lato dell'auto.
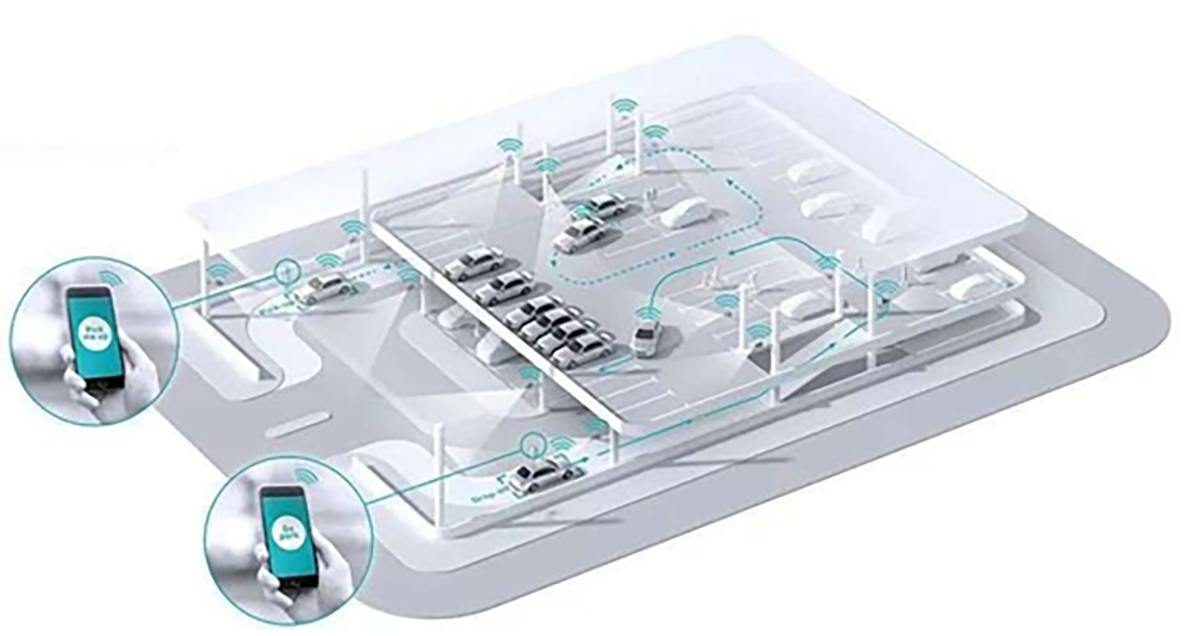
Figura 11 Sistema di parcheggio custodito automatizzato
La Figura 12 mostra uno schema fattibile di layout del nodo UWB all'estremità del veicolo. Un totale di quattro nodi UWB PEPS sono posizionati sui fari e sui fanali posteriori e un quinto nodo UWB PEPS+AVP è posizionato sul tetto. Il quinto nodo può ricevere sia il segnale UWB nell'auto che il segnale UWB all'esterno dell'auto ed è anche il nodo chiave per realizzare la funzione AVP.
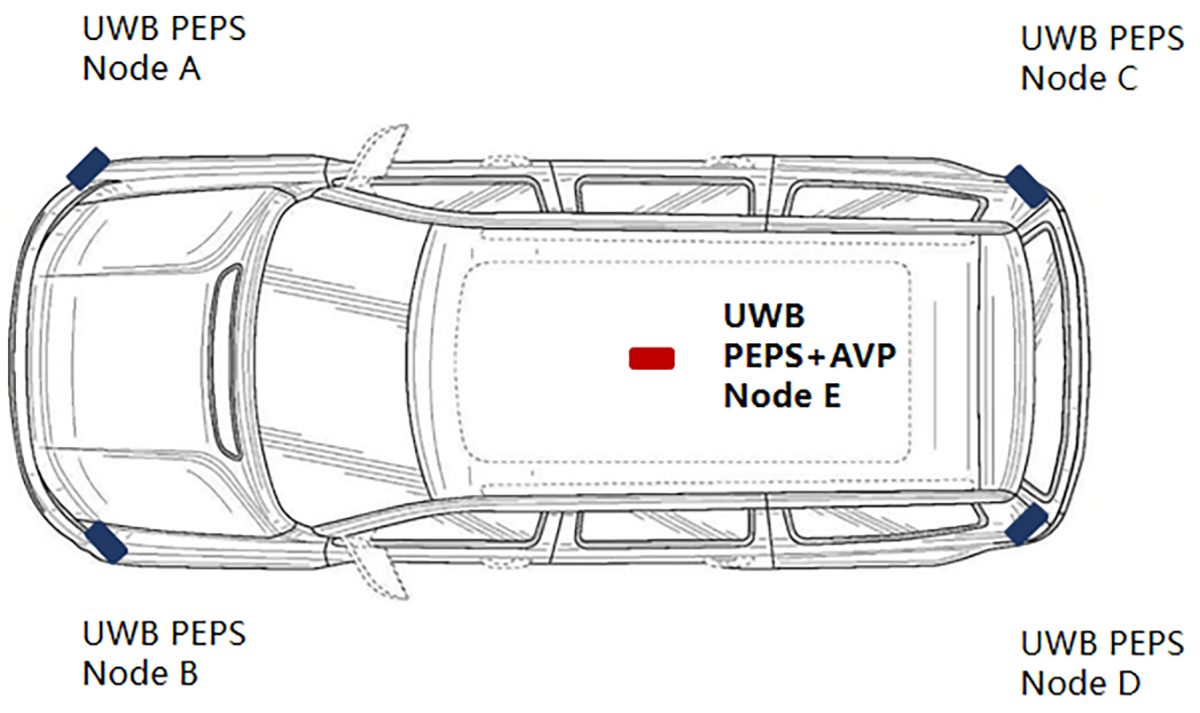
Figura 12 Architettura di PEPS + AVP
In modalità PEPS, il quinto nodo UWB collabora con gli altri quattro nodi UWB per completare la misurazione della posizione della smart key e invia le informazioni di range al body domain controller (BCM) per completare il calcolo della posizione della smart key chiave, in modo da decidere il successivo sblocco e avviare le operazioni.
Conclusione
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
telefono : +86 (0)28-86925399
E-mail : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785














